네 바퀴로 달리다가 몸을 일으키고 이내 하늘을 난다. 영화 ‘트랜스포머’에 나오는 오토봇들처럼 자유자재로 변신하며 이동하는 로봇이 개발됐다. 트랜스포머 로봇이 상용화되면 외진 곳에 소포를 배달하거나 우주 탐사에 활용될 것으로 기대된다.
미국 캘리포니아공대(칼텍) 항공우주공학과의 모르테자 가립(Morteza Gharib) 교수와 노스이스턴대 전기컴퓨터공학과 얼리제라 라메자니(Alireza Ramezani) 교수 연구진은 6월 28일(현지시각) 국제 학술지 ‘네이처 커뮤니케이션’에 “로봇이 바퀴를 프로펠러와 손으로 변형하며 기어다니다가 일어서고 하늘을 날아다니도록 했다”고 밝혔다.
자연의 거북, 미어캣에서 영감받아
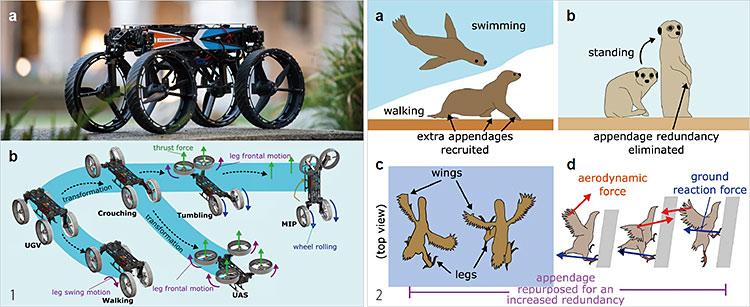
연구진은 동물에서 트랜스포머 로봇에 대한 영감을 얻었다고 밝혔다. 칼텍의 가립 교수는 “거북이는 모래 위를 기어다니다가 물속에서 아주 능숙하게 수영할 수 있다”며 “이를 위해 동물은 자기 팔다리나 날개를 상황에 따라 다양한 용도로 쓴다”고 설명했다.
이를테면 바다사자 지느러미는 바다에서는 헤엄치는 데 쓰지만, 육지에서는 다리처럼 사용한다. 미어캣은 다리로 뛰어다니다가 정찰할 때는 뒷다리를 세워 일어선다. 새도 날개로 하늘을 날지만, 언덕을 기어오를 때는 몸의 균형을 잡는 데 활용한다.
연구진은 이번에 개발한 ‘다중 이동 수단 변신 로봇(Multi-Modal Mobility Morphobot)’을 알파벳 첫 글자를 따 M4로 불렀다. 로봇은 지상에서 네 바퀴를 굴려 이동하다가 바퀴를 수평으로 접으면 프로펠러가 돼 하늘을 나는 드론이 된다.
M4는 비행, 구르기, 기어가기, 웅크리기, 균형 잡기, 텀블링, 정찰, 물체 집기 등 8가지 기능을 수행할 수 있다고 연구진은 설명했다. 정찰 모드에서는 미어캣처럼 뒤쪽 두 바퀴를 세워 일어서 주변을 더 잘 볼 수 있다. 앞바퀴가 프로펠러가 돼 몸을 일으킨 덕분이다.
도로 상태 따라 신발 바꾸는 로봇도
이전에도 상황에 따라 변신하며 이동하는 로봇이 있었다. 앞서 연구는 바퀴의 변신에 집중됐다. 지난 2020년 미국 조지아 공대 연구진은 국제로봇자동화학술대회(ICRA)에서 사람처럼 도로 사정에 따라 발 모양을 바꾸는 트랜스포머 로봇을 발표했다. 평지는 바퀴로 달리고 도로 사정이 나빠지면 갈퀴 모양의 다리로 걸어서 이동했다.
자동차가 모래에 빠지면 바퀴가 헛돌고 꼼짝하지 못한다. 하지만 사람은 두 다리로 모래사장이든 눈밭이든 문제없이 이동한다. 연구진은 이를 로봇에 적용했다. 길이 울퉁불퉁해지면 바퀴 가운데 있는 T 자형 홈에 갈퀴 모양의 로봇 다리를 끼운다. 이제 로봇은 곤충처럼 갈퀴 로봇 다리를 움직여 험한 길을 걸어갈 수 있다.
특히 로봇은 자체 로봇 팔로 바퀴를 직접 교체 할 수 있다. 길이 험해지면 로봇 팔이 동체에 들어 있는 로봇 다리를 꺼내 바퀴에 끼운다. 로봇 다리는 자석의 힘으로 미끄러지듯 홈에 결합한다. 다리 교체는 13초면 됐다. 칼텍과 노스이스턴대 연구진은 이번에 로봇의 변신을 지상에서 공중으로 확대한 셈이다.
비포장 길에선 두 배로 바퀴 벌크업
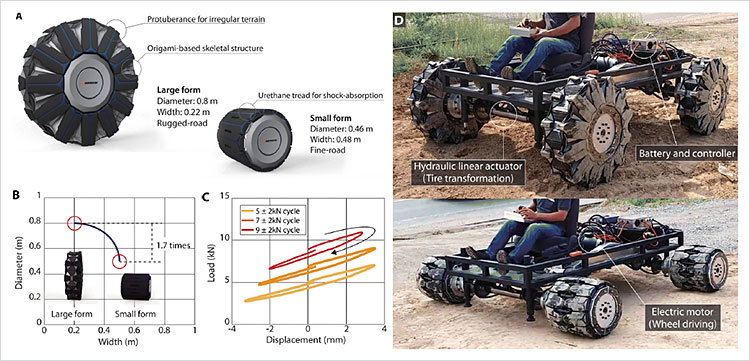
지난 2021년 한미(韓美) 공동 연구진은 평지에서는 지름이 작은 바퀴로 가다가 험지로 접어들면 바퀴 지름이 커져 장애물을 쉽게 넘어갈 수 있는 트랜스포머 자동차를 개발했다. 서울대 기계공학부의 조규진 교수와 미국 하버드대의 박사 후 연구원인 이대영 박사, 한국타이어의 손창영 수석 공동 연구진은 국제 학술지 ‘사이언스 로보틱스’에 “종이접기 원리를 이용해 도로 사정에 따라 바퀴 형태가 바뀌는 트랜스포머 타이어를 개발해 1t급 자동차에서 성능을 입증했다”고 밝혔다.
트랜스포머 타이어는 평평한 도로를 달릴 때는 지름이 46㎝이다. 도로가 험해지면 모터 힘으로 축이 당겨지면서 타이어 지름이 80㎝로 커진다. 호떡 반죽을 누르면 납작해지면서 크기가 커지듯 타이어 폭이 48㎝에서 22㎝로 줄고 반대로 지름은 커진다. 조 교수는 “자동차가 넘을 수 있는 장애물의 크기는 바퀴의 지름에 비례한다”며 “바퀴가 커지면서 동시에 표면에 돌출부를 만들어 장애물을 타고 넘는 능력이 배가됐다”고 말했다.
연구진은 평면인 종이를 접어 입체를 만드는 종이접기 원리로 트랜스포머 타이어를 만들었다. 항공기에 들어가는 알루미늄 조각을 타이어 골격에 쓰이는 나일론 천에 붙였다. 종이를 접듯이 알루미늄 조각 사이의 천이 접히면서 입체 타이어가 만들어진다. 바깥에는 폴리우레탄을 붙여 충격을 흡수하도록 했다.
한국타이어앤테크놀로지의 구본희 연구개발혁신총괄은 “대학의 새로운 아이디어와 기업의 기술력이 합쳐져 시너지를 보인 사례”라고 평가했다. 교수는 “앞으로 한국타이어와 후속 연구를 진행해 한국의 달 탐사 차량에도 우리 트랜스포머 타이어를 적용하고 싶다”고 했다.
화성 탐사 로버와 헬기 결합 가능
과학자들은 주변 환경에 따라 이동 형태를 바꾸는 로봇이 교통망이 열악한 곳에서 활용될 수 있다고 전망했다. 도로망이 갖춰지지 않은 외진 곳에 소포를 배달하거나 자연재해 현장에서 수색과 구조 작업을 도울 수 있다.
특히 이번에 나온 M4는 바퀴의 변신으로 로봇의 활동 영역을 공중으로도 확장했다. 노스이스턴대의 라메자니 교수는 “이 기술은 미래의 우주 탐사, 특히 화성 탐사의 형태를 변화시킬 수 있다”고 말했다.
현재 화성의 로버(rover·이동형 탐사 로봇)는 네 바퀴를 굴려 이동한다. M4가 화성에 간다면 평평한 곳에서는 기존 로버처럼 이동하다가 장애물을 만나면 뒷바퀴로 일어서 넘을 수 있다. 계곡이 깊으면 아예 바퀴를 프로펠러로 변신해 날면 된다. 최근 화성 탐사에 투입된 헬기 로봇이 기존 로버와 한 몸이 되는 셈이다.
연구진은 하늘과 땅을 넘나들 수 있게 됐으니, 앞으로는 물에서 수영할 수 있는 로봇을 개발하겠다고 밝혔다. 가립 교수는 “우리 주변의 자연을 감상하는 것만으로도 우리가 할 수 있는 일은 무궁무진할 것”이라고 밝혔다.