꿀벌을 포함해 나비와 딱정벌레 같은 수분(꽃가루를 수술에서 암술로 옮기는 행위) 매개체가 인간 삶에 미치는 영향은 매우 크다. 수분이 원활하지 못하면 과일이나 식량 생산량이 급격히 줄어든다. 사람이 먹는 음식 3분의 1이 이들의 활동에 의존한다.
최근 들어 수분 매개체가 심각한 위기를 맞고 있다. 미국과 독일 연구진에 따르면, 2006년~2023년 북미 벌 가운데 약 25% 감소한 것으로 나타났다. 2023년에는 수분 매개체 감소로 건강한 음식 공급이 줄어들면서 매년 50만 명이 조기 사망하고 있다는 보고서도 나왔다. 전문가는 수분 매개체 감소 원인으로 환경호르몬과 기후변화를 꼽지만 뚜렷한 대책을 내놓지 못하고 있다. 과학자는 대재앙을 막을 대안으로 초소형 비행 로봇에 주목하고 있다.
손바닥보다 작은 곤충 로봇 17분간 날아
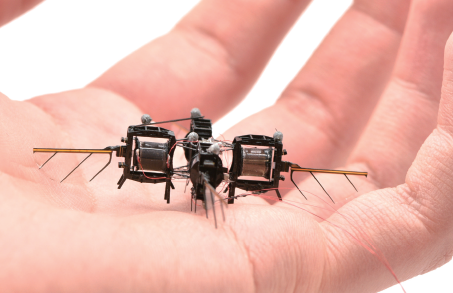
케빈 첸 미국 매사추세츠공대(MIT) 전기공학컴퓨터과학(EECS) 교수 연구진은 1월 17일(현지시각) 국제 학술지 ‘사이언스 로보틱스’에 꿀벌처럼 날개를 펄럭여서 1000초(16분 46초) 이상 나는 초소형 비행 로봇을 개발했다고 소개했다. 이번 연구에는 서울대를 졸업하고 MIT에서 박사과정을 밟고 있는 김수한 연구원이 제1 저자로 참여했다.
연구진이 개발한 초소형 로봇은 네 방향으로 각각 날개가 한 개씩 달려 있다. 가로 4㎝, 세로 4㎝, 높이 0.9㎝로, 손바닥에 올려놓을 정도로 작다. 무게도 종이 클립보다 가벼운 750㎎에 불과하다.
연구진에 따르면, 이 로봇은 한 번 비행에 1000초 이상 날았다. 이는 대표적인 드론 회사인 중국 DJI의 입문용 드론의 체공 시간과 거의 비슷한 수준이다. 지금까지 개발된 날갯짓하는 초소형 비행 로봇 중에서 가장 오래 날았던 로봇보다 체공 시간이 100배나 길다. 첸 교수는 “이번에 개발된 로봇은 한 번에 지금까지 다른 여러 연구진이 수행한 전체 시험비행시간을 합친 것보다 더 오래 날 수 있다”며 “로봇 수명과 정밀도가 개선되면서 꿀벌을 대신할 수분 매개체가 될 수 있는 수준에 한 걸음 더 다가섰다”고 말했다.
현재 사용되는 드론은 헬리콥터처럼 로터가 회전하는 힘이나 항공기처럼 고정익에 달린 프로펠러나 제트엔진이 내는 힘으로 나는 방식이 대부분이다. 정작 하늘을 나는 새나 곤충처럼 날개를 펄럭여서 나는 비행 로봇은 좀처럼 보기 어려웠다. 날갯짓하는 비행 로봇은 모터나 날개를 펄럭이는 장치가 복잡하고 무거워서 비행 효율이 떨어지는 경우가 많기 때문이었다.
과학자는 최근 새와 곤충의 날개와 근육 같은 생체에서 영감을 얻은 기술에 주목하고 있다. 하지만 살아있는 생명체를 기계적으로 모방하는 건 아직 한계가 많다. 비교적 최근 개발한 생체 모방 로봇도 속도가 느리고 고장이 잘 나며 10초 이상 뜨지 못한다.
첸 교수 연구진은 2021년 각각 날개 두 개가 달린 액추에이터(구동장치) 네 개로 구성된 비행 로봇을 개발했다. 하지만 날개가 여덟 개 달린 이 로봇은 비행 성능이 떨어졌다. 날개가 펄럭일 때 공기가 서로 부딪쳐 양력이 약해지기 때문이다. 연구진은 구조를 바꿔 액추에이터에 날개를 두 개씩 다는 대신 한 개씩만 달고 설치 방향도 겹치지 않도록 바깥쪽으로 향하게 했다. 이런 구조는 결과적으로 로봇의 날갯짓을 안정시키고 양력을 증가시킨 것으로 나타났다.
곤충 근육 모방해 비행 성능 개선
인공 근육 역할을 하는 액추에이터는 빠르게 압축됐다가 늘어나며 날개를 펄럭이는 힘을 생성한다. 하지만 날갯짓이 일정 속도를 넘으면 날개 구조가 휘면서 효율성이 떨어지는 현상이 나타난다. 연구진은 이런 구조 변화를 억제해서 인공 근육의 부담을 줄이고 더 힘을 내는 정교한 변속장치를 만들었다.
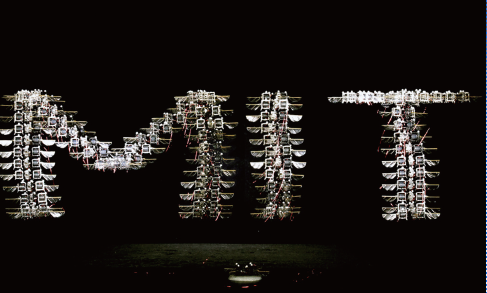
연구진은 비행 로봇에 전기를 공급하는 구리 선을 연결한 다음 1~2m 높이로 날렸다. 로봇은 동급 비행 로봇보다 빠른 초속 0.35m로 날며 두 번 연속 공중 뒤집기, 공중에서 ‘MIT’ 철자를 따라 나는 곡예비행을 잇달아 선보였다.
이번에 개발된 초소형 비행 로봇은 아직 유선 조종 방식이다. 또 주변 환경을 탐지하는 센서도 달려 있지 않다. 김 연구원은 “비슷한 초소형 비행 로봇은 최소 2초에서 최대 40초 정도가 지나면 고장이 나서 고쳐야 하거나 테스트하고 정밀한 제어를 하는 데 한계가 많았다”며 “이번 연구로 곤충 같은 비행 지구력, 정밀성과 민첩성을 확보하게 되면서 향후 감지 기술과 배터리 기술 같은 후속 연구 기회를 열었다”고 말했다.
연구진은 후속 연구로 구리 선을 치우고 일반 드론처럼 배터리를 싣고 나는 새 버전을 선보일 계획이다. 비행시간도 지금보다 10배로 늘어난 1만 초(2시간 47분)로 늘리고 실제 벌처럼 꽃에 정밀하게 내려앉는 능력을 확보하는 방안도 추진한다. 이렇게 하면 3~5년 안에 자율 비행과 탐색에 필요한 배터리와 센서를 싣고 나는 비행 로봇을 선보일 수 있을 것으로 전망했다.
빌 게이츠도 관심 보인 수분 매개체 로봇
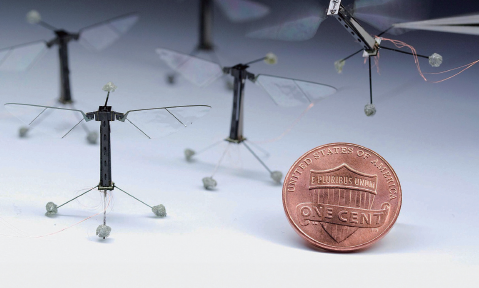
전문가는 꽃가루를 옮길 정도로 작은 비행 로봇이 개발되면 건물에서도 다양한 과일과 채소를 재배할 수 있을 것으로 보고 있다. 식물 공장 같은 실내 공간 내부를 로봇이 날아다니며 꽃가루받이를 할 수 있기 때문이다. 로버트 우드 하버드대 교수 연구진은 꽃가루를 옮기는 수분 매개체 역할을 할 마이크로 로봇 군집 기술을 개발하고 있다. 우드 교수는 기존에 사용하던 모터가 초소형 로봇을 만드는 데 한계가 있다는 점에 주목해 가벼운 압전 소재(전기를 힘으로 바꾸는 소재)를 이용해 날아다니는 0.1g의 로봇 벌(Ro-bobee)을 개발하고 있다. 빌 게이츠 마이크로소프트(MS) 창업자는 2019년 미국 보스턴의 우드 교수 연구실을 직접 찾아 로봇 벌 무리에 비상한 관심을 나타내기도 했다.
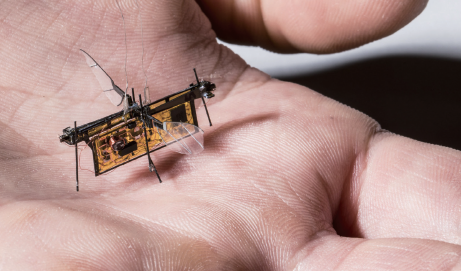
소이어 풀러 워싱턴대 연구진도 이쑤시개보다 약간 더 무겁고 작은 날개를 펄럭이며 나는 로봇 파리(RoboFly)를 개발하고 있다. 풀러 교수 연구진이 개발 중인 이 로봇은 레이저 빔을 쏴서 조종하는 방식이다. 로봇 몸에 있는 미세한 회로가 레이저 에너지를 전기로 바꾸어 날개를 펄럭이게 하는 원리다. 연구진은 기술이 더 발전하면 작물을 조사하고 재난 생존자를 찾고 가스 누출을 확인하는 데 활용할 수 있을 것으로 기대한다.
숙제는 남아 있다. 초소형 로봇을 개발하는 전문가조차도 아직은 어떤 로봇도 곤충의 능력에 미치지 못한다고 평가한다. 지금까지 개발된 가장 성능이 뛰어난 로봇도 지구력, 속도, 기동성 측면에서 벌과 같은 수분 매개체엔 상대가 되지 않는다. 꿀벌만 해도 근육과 단 두 개의 날개만으로 빠르고 정밀한 비행을 선보인다. 김 연구원은 “드론에 장착한 모터는 어느 단계 이하로 내려가면 더 줄이기 어렵다”며 “초소형 비행 로봇에 들어가는 인공 근육 같은 기술은 드론을 지금보다 훨씬 작게 만드는 데 분명 이바지할 것으로 기대한다”고 말했다.