인공지능(AI) 발달로 휴머노이드(인간형 로봇)가 산업 현장의 혁신을 이끌 새로운 동력으로 주목받는다. 현재 휴머노이드에 대한 명확한 정의는 없지만, 인간 형태와 움직임을 유사하게 모방해 인간이 수행하기 힘든 다양한 환경에서 주어진 기능과 행동을 할 수 있도록 설계된 로봇을 뜻한다.
기존 산업용 로봇이나 길 안내, 음식 나르는 서빙 로봇은 별도 활동 환경이 필요한데, 휴머노이드는 인간이 일하는 환경에서 함께 생활할 수 있다. 이런 특성으로 센서가 장착된 ‘머리’가 있고, 이족 보행이 가능하고, 물건을 잡을 수 있는 손이 있는 등 인간 특징과 특성을 갖췄다. 초기 휴머노이드는 제한적인 작업만 가능했던 반면, 현재는 생성 AI 기술 발달로 직접 사람과 소통하며 다양한 작업을 할 수 있는 수준으로 진화하고 있다.
어린아이 수준 아시모가 성인에 가깝게 진화

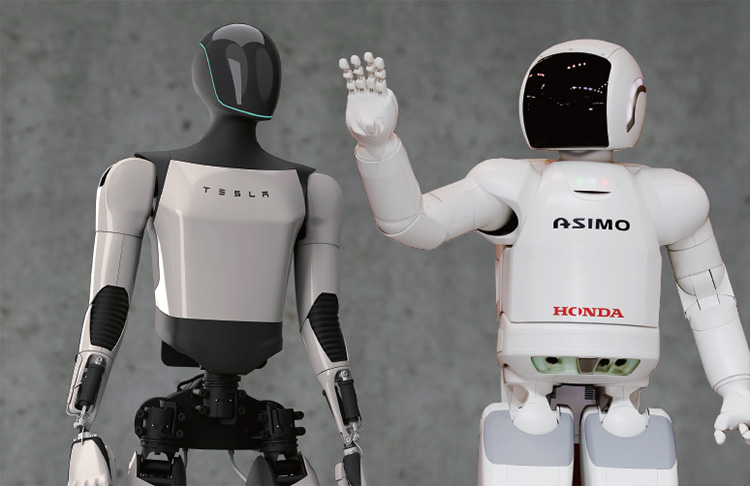
휴머노이드의 최초 사례는 1973년 일본 와세다대 가토 이치로 교수팀이 개발한 ‘와봇-1(WABOT-1)’이다. 단 몇 걸음에 불과했지만 두 발로 걸어 화제를 모았고, 이어 1984년 악보를 보고 피아노를 치는 ‘와봇-2’가 개발됐다. 이후 걸음마 수준이던 로봇 기술은 눈부시게 발전했고, 2000년 일본 혼다가 내놓은 휴머노이드 ‘아시모’의 등장에 세계가 놀랐다. 아시모는 최초의 이족 보행 로봇으로, 두 팔과 두 다리를 갖고 있었다. 키 130㎝, 몸무게 48㎏으로, 어린이처럼 걷고 움직였다. 일본 애니메이션 ‘철완 아톰’에서 영감을 받아 개발됐다.
아시모가 어린아이 수준의 휴머노이드라면, 지금 나오는 휴머노이드는 성인에 가깝다. 키 155~175㎝, 몸무게 70㎏의 성인과 비슷한 크기에 사람의 동작을 따라 배우고, 실시간으로 소통할 수 있는 AI 두뇌를 가지고 있다. 체형과 지능 모두 성장한 셈이다.
휴머노이드가 성인 수준으로 발전한 계기는 2011년 3월 11일 일본 도호쿠 지방 태평양 해역 지진이다. 이 지진으로 일본 후쿠시마의 원자력발전소에서 고농도 방사능 오염 기체가 대량 유출되는 사고가 있었는데, 이때 로봇을 사고 현장에 투입하고자 했으나 당시 구조할 수 있는 로봇이 없다는 것에 과학자는 큰 실망을 하게 됐다. 이런 사태를 겪은 뒤, 미국 고등방위연구계획국(DARPA) 주최로 2013년 세계 재난 구조 로봇 대회 ‘다르파 로봇 챌린지(DRC)’가 세계 최초로 열렸다.
DRC에 참가한 로봇에는 실제 원전 사고 지역과 비슷하게 만든 재난 현장에서 운전하고, 문을 여닫으며, 밸브를 돌리거나, 드릴로 구멍을 뚫는 일을 하는 등 사람의 일과 똑같은 여덟 개 과제가 주어졌다. 이 대회는 2015년까지 치러졌는데, 마지막 2015년 대회에서 KAIST(한국과학기술원)의 휴보가 세계 유수의 휴머노이드를 제치고 1위를 차지했다. DRC는 전 세계 휴머노이드의 활동 반경이 연구실에서 산업 현장으로 옮겨지게 된 중요한 이벤트로 여겨졌다.
휴머노이드도 두뇌와 척추가 필요하다
휴머노이드는 사람처럼 움직이고, 일을 해야 하기 때문에 두뇌가 되는 AI가 가장 중요하다. 로봇이 상황을 인식하고 판단해 능동적인 기능을 수행해야 해서다. 공간을 인지하고, 이 공간을 두 발로 걷거나 뛸 수 있어야 하며, 두 팔의 손가락과 그 관절, 마디의 모터를 정밀 제어할 수 있어야 한다. 사람 및 장애물과 충돌을 실시간으로 회피하거나, 로봇 자신의 안정성도 유지할 수 있어야 한다.
이 두뇌에 해당하는 것이 온디바이스 AI용시스템 반도체로, 파운데이션 AI 모델(광범위한 데이터에 대해 훈련된 기계 학습 또는 딥러닝 모델)이 수행된다. 휴머노이드는 실행 시 서비스의 품질, 안정성 등으로 즉각적 반응이 요구된다. 이 때문에 AI 기능 실행을 제한된 시간 안에 끝마칠 수 있어야 하고, 배터리 사용도 필수다. 센싱, 컴퓨팅이 반복적으로 일어나 실행 시간을 늘리기 위한 저전력 기술도 중요하다. 칩은 엔비디아 젯슨 시리즈, 퀄컴 로봇 플랫폼 RB6, 삼성전자 엑시노스 오토가 주목받는다.
몸체는 심장과 손, 팔, 다리, 감각 등을 포함한다. 센서, 배터리, 액추에이터(actuator· 작동기) 등이 사용된다. 휴머노이드의 심장에 해당하는 배터리는 최대 작업 시간과 높은 출력의 성능을 요구한다. 사람처럼 느끼고, 교감하는 역할의 센서가 있고, 손가락은 용도에 따라 두 개, 세 개, 다섯 개로 구분된다. 보행 능력과 균형 감각 기술은 낙상 등의 사고를 방지하고, 안정적인 이동과 현장에서 원활한 작업 수행에 필수다.
주요 빅테크 모두 참전… 휴머노이드 경쟁 격화
글로벌 투자은행 모건스탠리는 ‘휴머노이드 100’ 보고서에서 해당 시장 규모가 향후 10년 내에 최대 60조달러(8경6160조원)에 달할 것으로 전망했다. 미국과 중국은 반도체에 이어 휴머노이드 시장에서도 전쟁을 펼치는데, 기업 중심인 미국과 달리 중국은 정부가 앞장서고 있다.
대표적인 미국 기업은 테슬라로, 2022년 범블리를 시작으로 2023년 옵티머스 1세대, 2세대를 연속 발표했다. 현대자동차그룹(현대차그룹) 산하 보스턴다이내믹스는 유압식 구동 시스템을 전기식으로 변환해 에너지 효율과 가격 경쟁력을 강화한 휴머노이드 아틀라스2를 현대차그룹 싱가포르 글로벌혁신센터(HMGICS)에 시범 적용할 예정이다. 2022년 설립된 피규어AI도 관심받는다. 2024년 3월 AI 기반 피규어01을 내놨다. 이어 8월에는 피규어02를 선보였으며, 미국 캘리포니아주 BMW 공장에 시험 적용했다.
중국은 2016년 설립된 유니트리(UNI-TREE)가 있다. 1월 29일 중국 춘절연환만회(春節联欢晩会)에서 무용수 16명과 함께 군무한 휴머노이드 16대가 바로 유니트리의 H1이다. H1은 세계에서 가장 빠른 휴머노이드로 알려져 있다. 가장 큰 강점은 가격 경쟁력으로, 테슬라 옵티머스의 절반 가격이다.
이처럼 많은 빅테크(대형 정보기술 기업)가 관심을 갖고 이 시장에 뛰어드는 이유를젠슨 황 엔비디아 최고경영자(CEO)의 발언에서 찾을 수 있다. 그는 챗GPT가 텍스트·이미지·동영상 등 콘텐츠를 만들어 내는 생성 AI 시대를 연 것처럼, 로봇 중심의 물리 AI 시대가 머지않았다고 했다. 2025년 1월 미국 라스베이거스에서 열린 세계 최대 정보기술· 가전 박람회 ‘CES 2025’에서 젠슨 황은 14대의 휴머노이드와 연단에 올랐는데, 이들 휴머노이드를 개발한 중국 기업이 여섯 곳으로 가장 많았다. 한국 기업은 없었다.
휴머노이드 시대가 본격 개화하고 있음에 따라 늦었지만, 정부 차원의 대대적 투자와 지원이 필요하다. 이 시기에 삼성전자가 레인보우로보틱스를 인수하고 미래로봇추진단을 만들어 본격적으로 로봇 사업을 추진한다는 소식이 반갑다.
휴머노이드 로봇의 등장은 인간을 대체할 일종의 기계 노동자가 나타난 것이다. 노동 관점에서 로봇과 인간이 어떻게 상호 보완하고, 공존할 것인지 고민해야 한다.
인간 근육까지 모방한 휴머노이드 프로토클론
폴란드 로봇 전문 기업 클론로보틱스는 약 1000개의 인공 근육을 갖춘 휴머노이드 프로토클론을 공개했다. 최근 공개된 프로토클론의 영상에는 신장 약 180㎝ 로봇이 천장에 매달려 사람처럼 팔다리를 휘젓는 모습이 담겨 있다. 인공 근육을 활용해 사람의 실제 움직임과 흡사한 모습을 보이는 이 로봇은 향후 가정용으로 상용화할 예정이다. 프로토클론에 내장된 인공 근육은 유압 유체로 채워진 풍선이 수축하고, 팽창하면서 인간 근육을 모방한다. 여기에 500W 전기 펌프가 로봇의 심장 역할을 해 분당 40L의 유체를 밀어낸다. 500개 센서를 장착했으며, 200가지 이상의 움직임이 가능하다. 클론로보틱스는 프로토클론 이전에도 상체나 팔 등 부분적으로 인간을 묘사한 로봇을 다수 선보였다. 회사 측은 “세계에서 가장 인간 수준의 손을 가진 근골격계와 초지능을 갖춘 안드로이드를 개발하는 게 목표”라고 했다.